TiltQ
Autonomous Tracking and Landing on a Moving Vehicle

Marker Based Landing with our Tilt-Augmented Quadrotor.
Supervisors: Prof. Mangal Kothari, Prof. Soumya Ranjan Sahoo
The task which we took on here was the fully autonomous landing of a quadrotor on a moving vehicle when the only input used for obtaining the position of the vehicle was visual and no communication existed between the vehicle and the quadrotor.
This paper was accepted in Control and Engineering Practices, an Elsevier Journal.
The quadrotor platform we used is an inhouse developed fully actuated platform named “ASTAIR”.
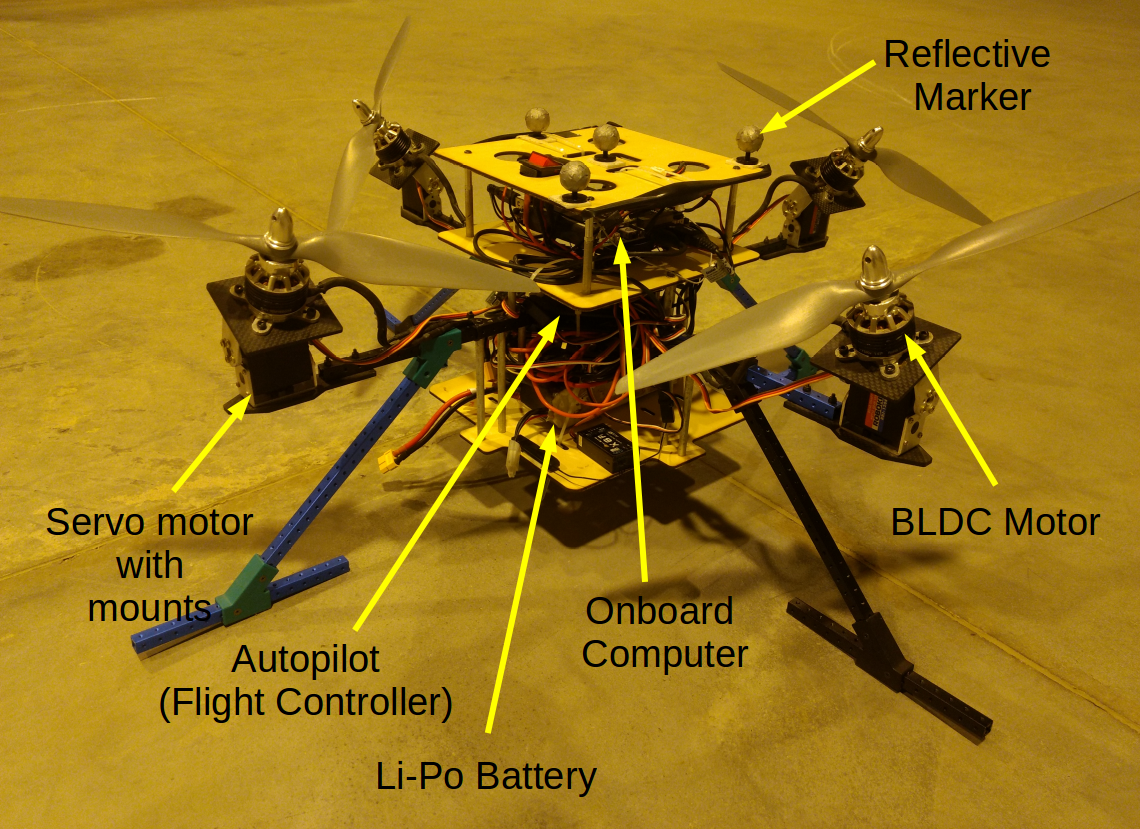

Right: ASTAIR, The quadrotor Used; Left: proposed system in action.